
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Bifurcations and Dynamics of Traveling Wave Solutions to a Fujimoto-Watanabe Equation
Cite this Article
Shi Li-Juan, Wen Zhen-Shu. Bifurcations and Dynamics of Traveling Wave Solutions to a Fujimoto-Watanabe Equation
. Communications in Theoretical Physics, 2018, 69(6): 631 
Permissions
Bifurcations and Dynamics of Traveling Wave Solutions to a Fujimoto-Watanabe Equation
† Corresponding author. E-mail:
Supported by the National Natural Science Foundation of China under Grant No. 11701191 and Subsidized Project for Cultivating Postgraduates’ Innovative Ability in Scientific Research of Huaqiao University
Abstract
Abstract
In this paper, we study the bifurcations and dynamics of traveling wave solutions to a Fujimoto-Watanabe equation by using the method of dynamical systems. We obtain all possible bifurcations of phase portraits of the system in different regions of the parametric space. Then we show the sufficient conditions to guarantee the existence of traveling wave solutions including solitary wave solutions, periodic wave solutions, compactions and kink-like and antikink-like wave solutions. Moreover, the expressions of solitary wave solutions and periodic wave solutions are implicitly given, while the expressions of kink-like and antikink-like wave solutions are explicitly shown. The dynamics of these new traveling wave solutions will greatly enrich the previews results and further help us understand the physical structures and analyze the propagation of the nonlinear wave.
1 Introduction1 ) can be connected with the famous KdV equation. As the advent of Eq. (1 ), its solutions received considerate attention. In 2010, by using an irrational equation method, Du[5] obtained some implicit expressions of traveling wave solutions to Eq. (1 ). Further, in 2010, Liu[6] gave the classifications of traveling wave solutions of Eq. (1 ) through the method of complete discrimination system. However, it is not so clear that what types of the traveling wave solutions are. In addition, are there other types of traveling wave solutions besides the solutions obtained in Refs. [5–6]? What is more, how about the explicit expressions of traveling wave solutions to Eq. (1 )? Driven by these motivations, in this paper, we study the dynamics of traveling wave solutions to Eq. (1 ) from the perspective of the theory of dynamical systems.[7–12] Based on the method of dynamical systems, we present all possible bifurcations of phase portraits in different regions of the parametric space, through which, we show the sufficient conditions to guarantee the existence of traveling wave solutions including solitary wave solutions, periodic wave solutions, compactons and kink-like and antikink-like wave solutions. Moreover, the expressions of solitary wave solutions and periodic wave solutions are implicitly given, while the expressions of kink-like and antikink-like wave solutions are explicitly shown.
The Fujimoto-Watanabe equation

2 Bifurcations of Phase Portraits4 ) becomes a regular system
In this section, we present the bifurcations of phase portraits corresponding to Eq. (
Substituting u(x,t) = φ(ξ) with ξ = x − ct into Eq. (

Integrating straightforwardly Eq. (

Letting y = φ′, we obtain a three-parameter planar system



System (
To study the singular points and their properties of system (

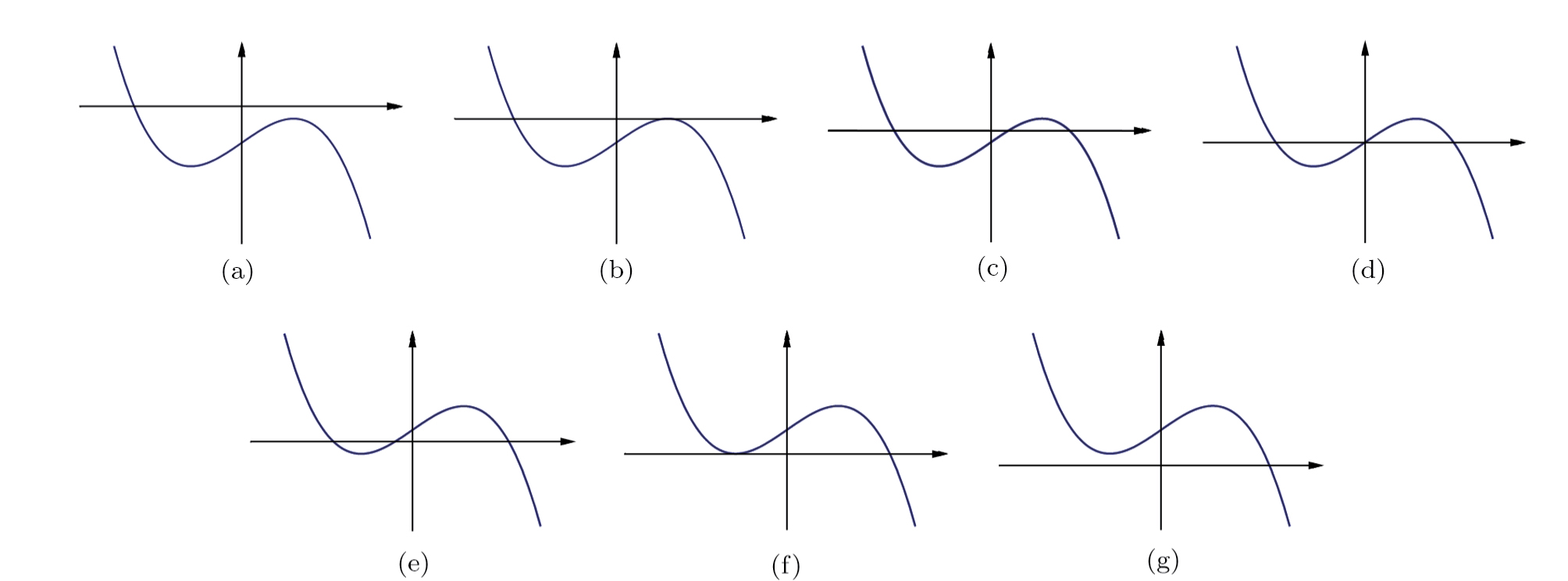
We can easily obtain the graphics of the function f(φ) in Figs.
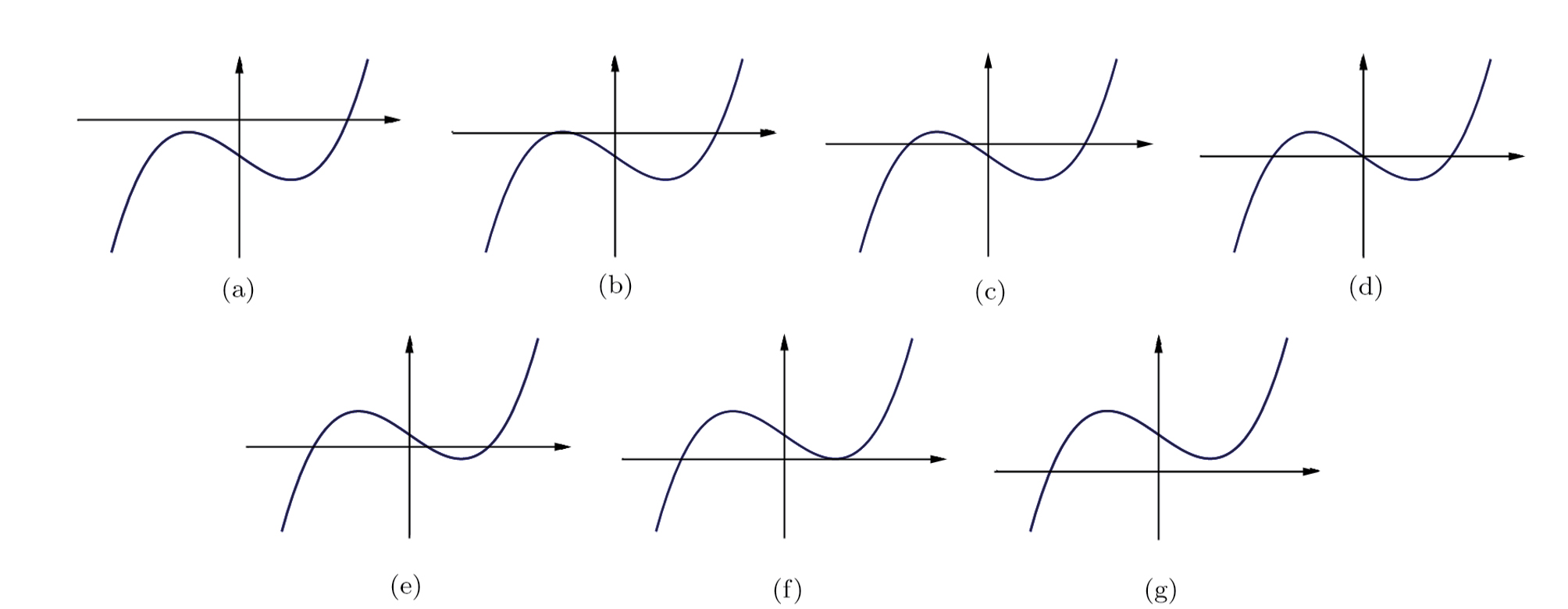 | Fig. 1 The graphics of the function f(φ) when α < 0 and c > 0. (a)       |
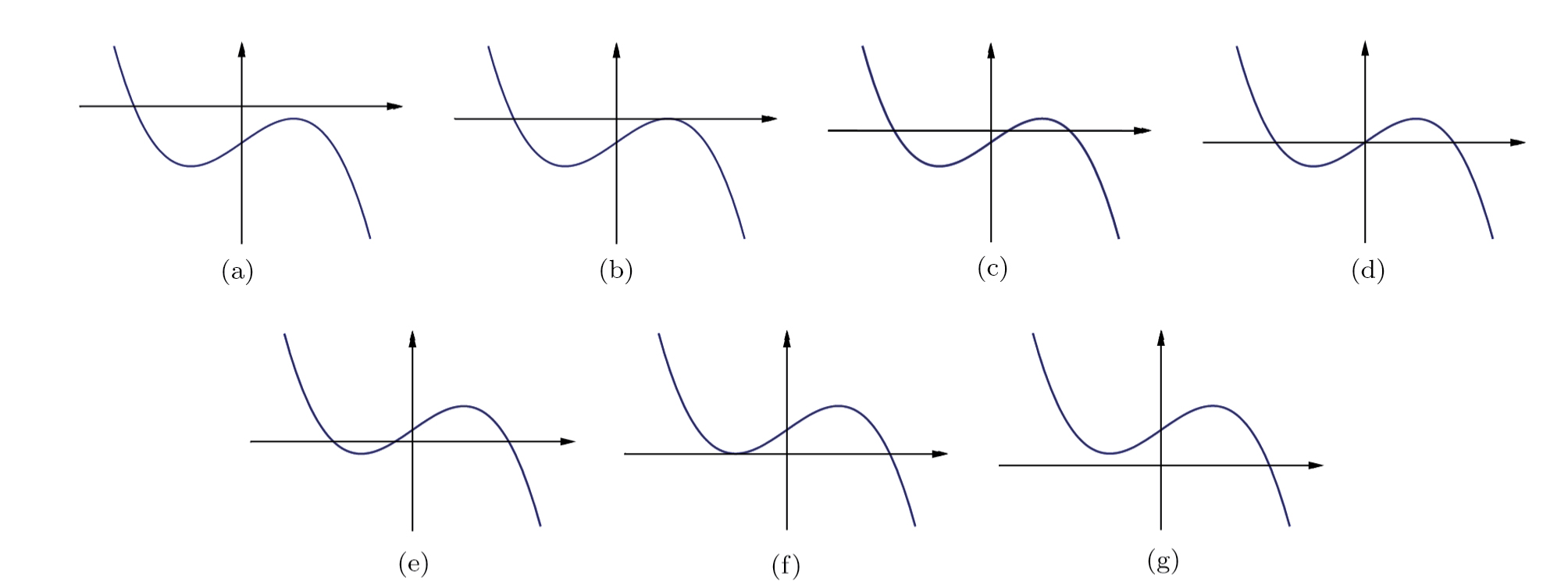 | Fig. 2 The graphics of the function f(φ) when α > 0 and c < 0. (a)       |
Let λ(φ*,y) be the characteristic value of the linearized system of system (

From Eq. (
We summarize the number, relative positions and dynamical properties of singular points of system (
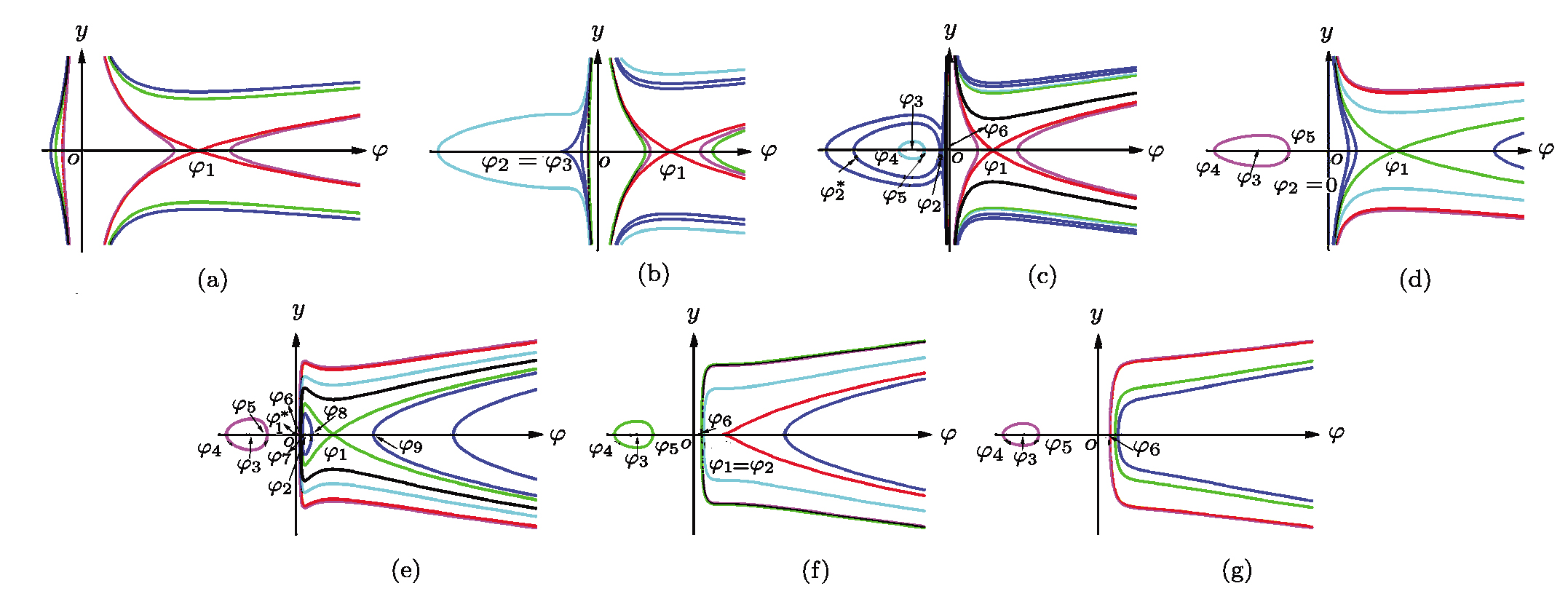
Therefore, based on the above analysis, we obtain all possible phase portraits of bifurcations of system (
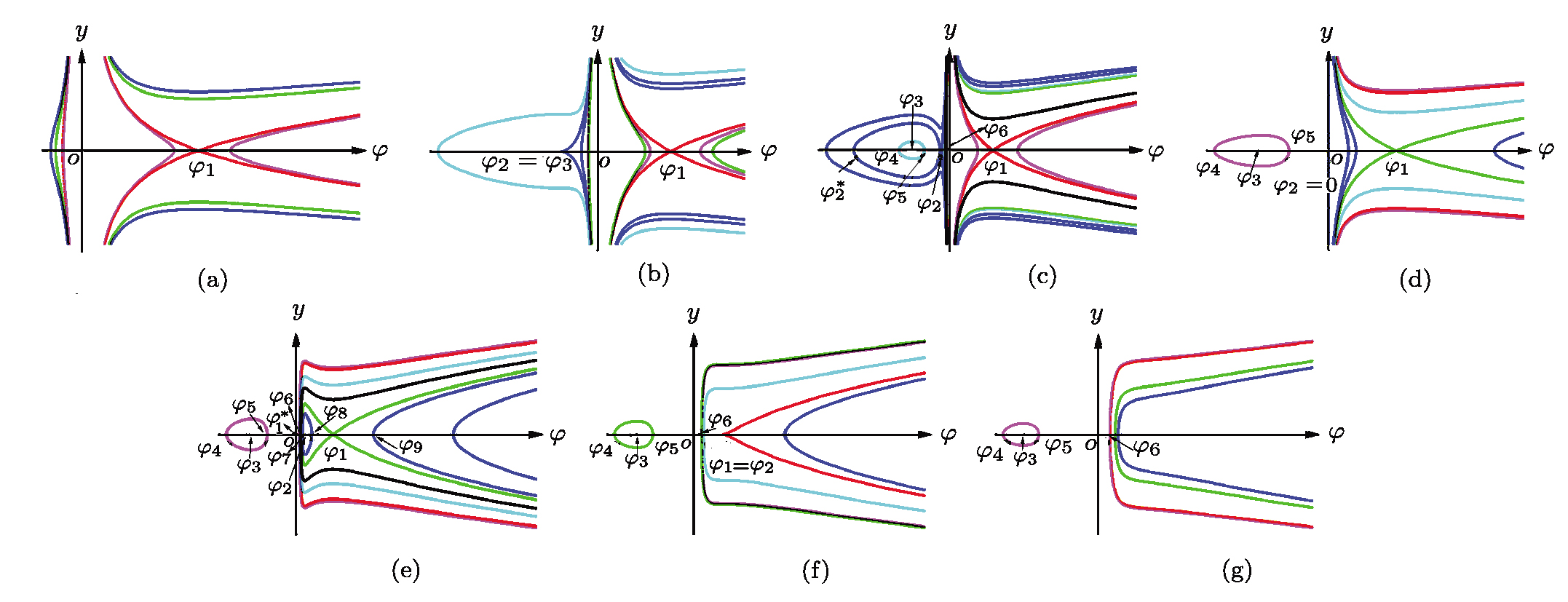 | Fig. 3 The phase portraits of system (      |
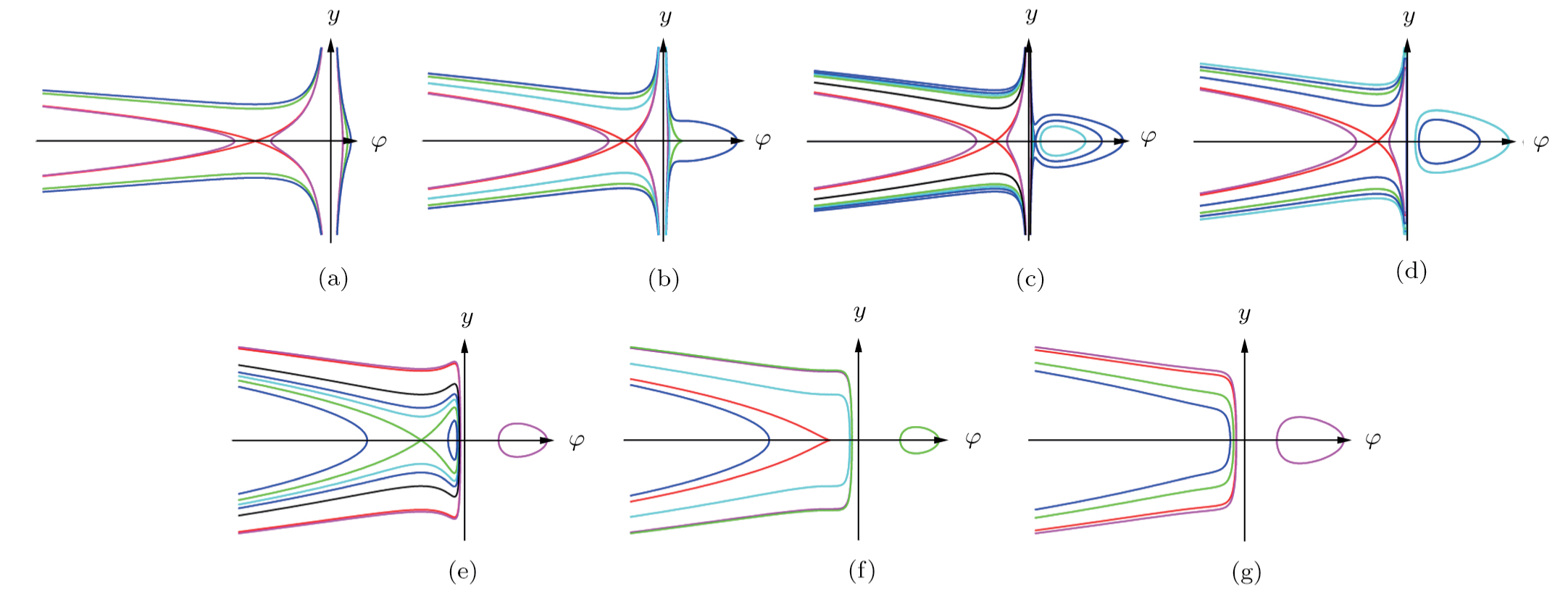
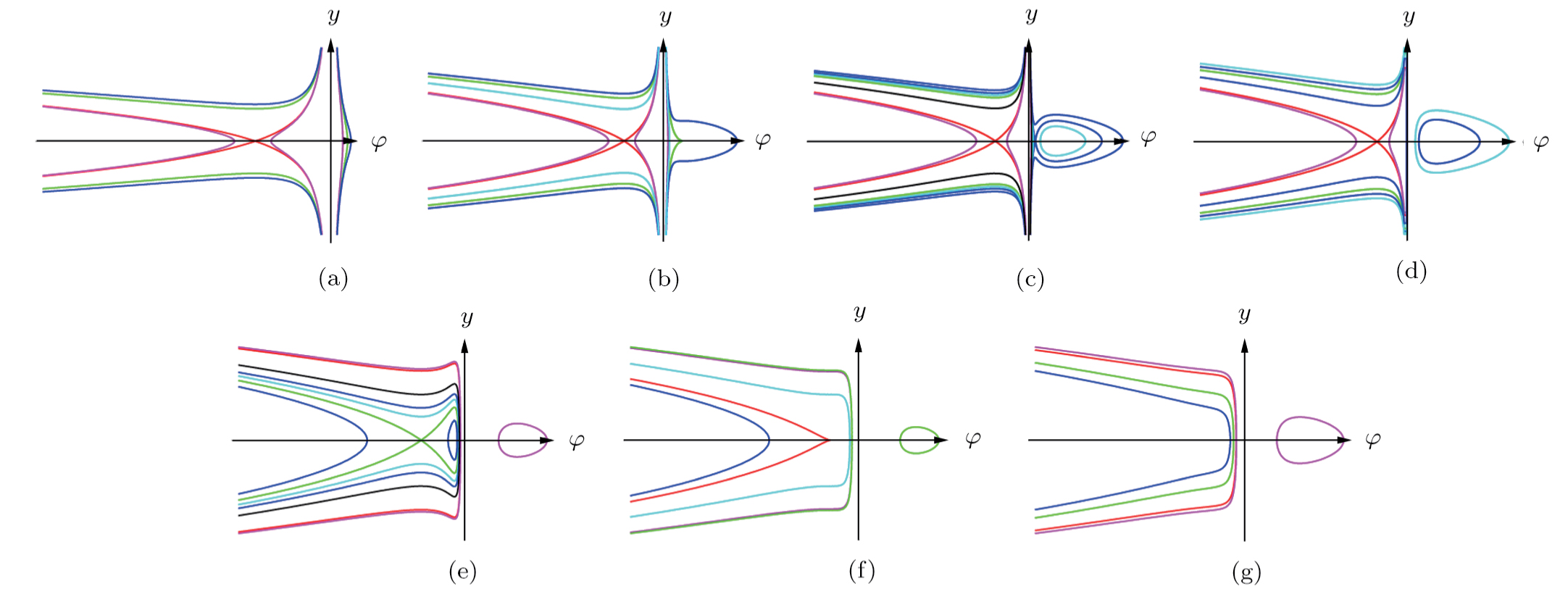 | Fig. 4 The phase portraits of system (      |
3 Main Results and the Theoretic Derivations of Main Results
To state conveniently, we introduce some marks,

Our main results will be stated in the following theorem, and the proof follows. Note that we only focus our attention on the case when α < 0 and c > 0 about the main results, because the other case when α > 0 and c < 0 can be considered similarly.
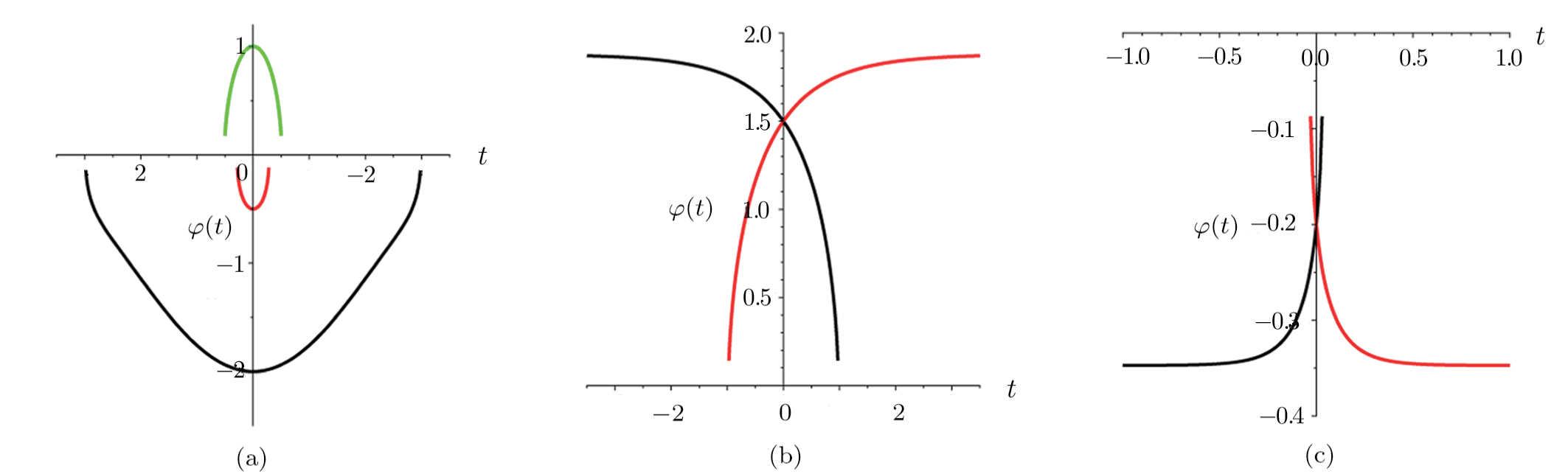
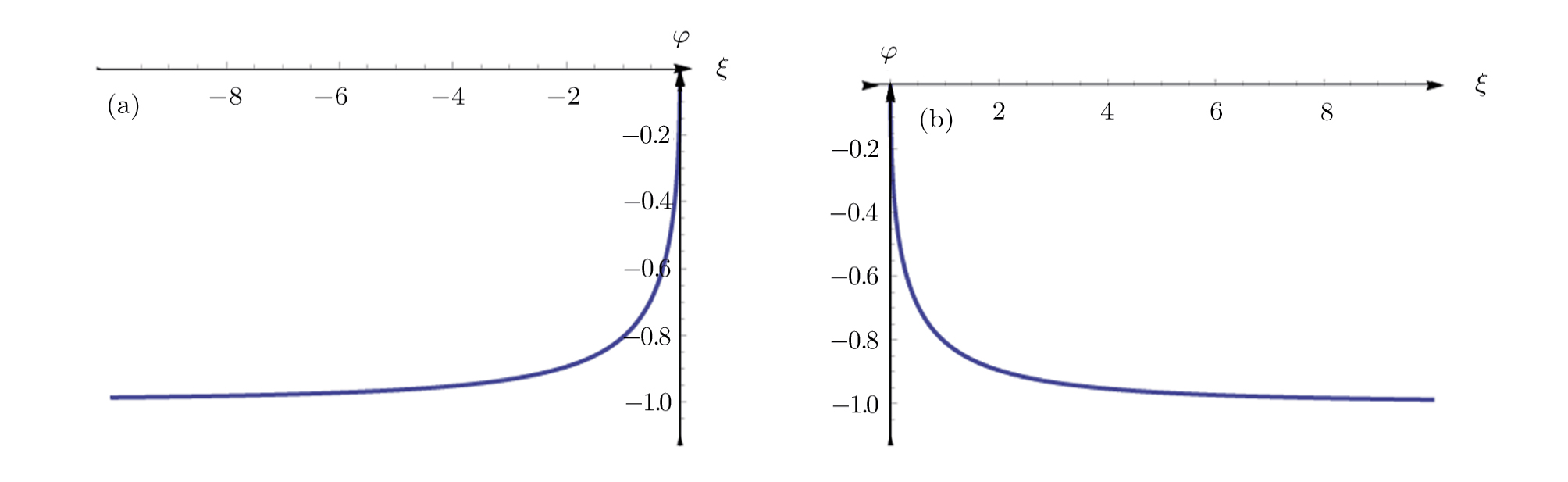
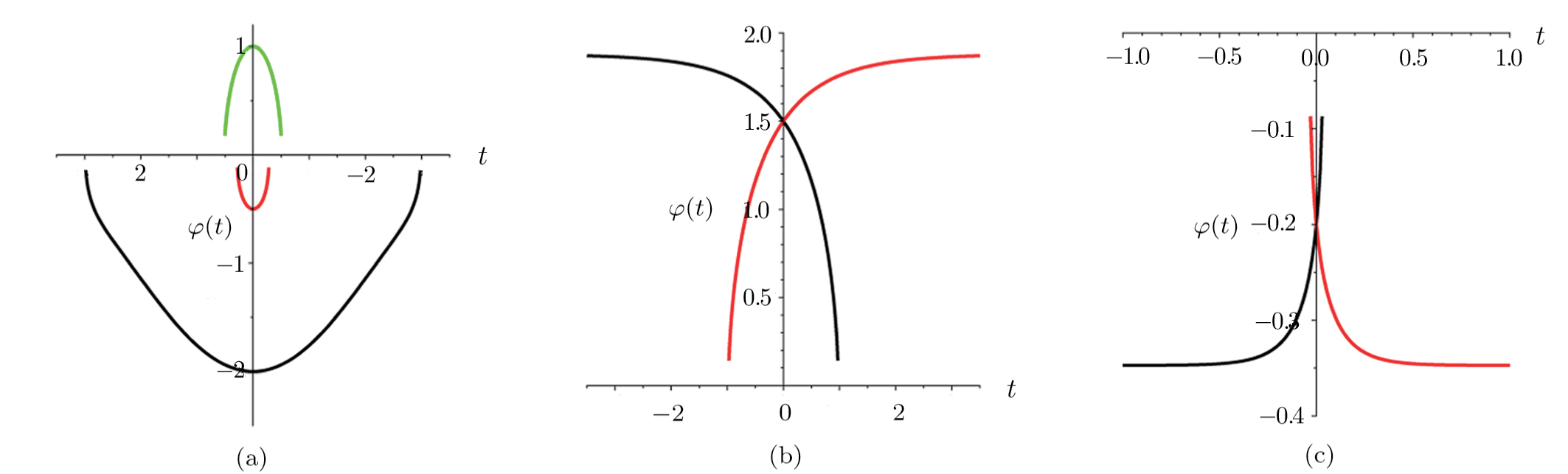 | Fig. 5 The compactons, kink-like, and antikink-like wave solutions to Eq. (   |
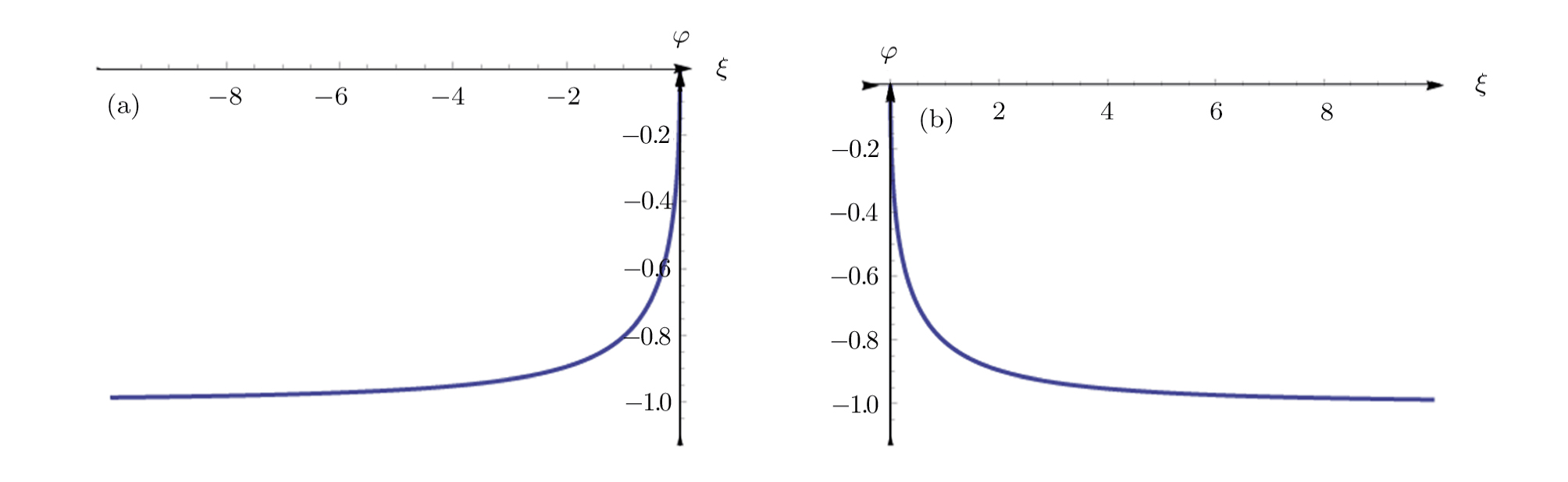 | Fig. 6 The graphics of the kink-like and antikink-like wave solutions Eq. ( |
4 Conclusions
In this paper, through all possible bifurcations for the system under different parameters conditions, we show the existence and dymanics of traveling wave solutions including solitary wave solutions, periodic wave solutions, compactons and kink-like and antikink-like wave solutions. Moreover, the expressions of solitary wave solutions and periodic wave solutions are implicitly given, while the expressions of kink-like and antikink-like wave solutions are explicitly shown. The dynamics of these new traveling wave solutions will greatly enrich the previews results and further help us understand the physical structures and analyze the propagation of the nonlinear wave.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] |